| Product(s): |
HAMMER |
| Version(s): |
V8i, CONNECT Edition |
| Area: |
Modeling |
| Original Authors: |
Tom Walski and Jesse Dringoli, Bentley Systems |
This article is intended as a starting point for those who are seeking to perform a transient simulation of a hydraulic model. It provides an overview of the information required and decisions that need to be considered.
Introduction
Any time that water accelerates or decelerates in a pipe a pressure wave is created. Usually, these changes are small and can be ignored. However, when larger pressure waves, referred to as transients, waterhammer or surges, can cause serious problems. High pressure waves can burst pipes or open joints; low pressures can collapse pipes or suck contaminated water into pipes. These pressure waves move quickly through water systems (about 3000 ft/s) and die off fairly quickly such that their impact can go unnoticed until they cause major problems.
Prevention or control of transients is not easy or intuitive. There are many ways to reduce rapid changes in velocity or reduce their impacts. Understanding them in any detail requires a transient analysis computer model.
Most water systems already have hydraulic models of their pipe network. However, models used for typical design and operation of water systems usually ignore rapid changes in velocity. Understanding transient requires solving equations that can account for these rapid changes in velocity and subsequent pressure waves. For anything beyond a trivial situation, these equations cannot be solved manually but require transient analysis software such as Bentley’s HAMMER program.
How much work is required to advance from hydraulic models to transient models? In most cases, most of the data required to build and run a transient model is available in the hydraulic model. The data would include pipe lengths and diameters and a description of the piping network. For example, Bentley’s WaterGEMS program contains most of the data required to construct and run the HAMMER model and can be opened directly in HAMMER. It is simply a matter of opening the model data in HAMMER and adding the data needed to describe transient events.
The hydraulic model used as a starting point needs to be well-calibrated and some simplifications for typical modeling can’t be used. For example, designing a downstream system by approximating the hydraulic grade of the upstream system will lead to misleading transient results if the upstream system plays a significant role in the transient. In situations where low pressure transients are being studied, the difference between the elevation of the pipe and the elevation of the ground (often used as pipe elevation) can become significant as this could influence the occurrence of vapor pockets in the pipe.
The results of HAMMER simulation runs are dependent on the initial conditions used as a starting point for the transient... Users need to set an initial steady state scenario that corresponds accurately with the conditions at the beginning of the transient event to be modeled.
Transient Parameters to add to a Hydraulic Model
The following sections describe the types of data required to convert a hydraulic model (WaterGEMS or WaterCAD) into a transient model (HAMMER).
Once a hydraulic model has been opened in HAMMER, there are several types of information that needs to be added:
- Wave speed,
- Description of event that triggers the transient
- Description of any transient control measures
- HAMMER calculation options
Note: this transient information can also be added in WaterGEMS and WaterCAD in preparation for a HAMMER run.
Wave speed
Wave speed (celerity) depends on the properties of the pipe and the fluid. The more rigid the pipe, the faster the wave speed. The pipe properties are characterized by Young’s modulus, Poisson’s Ratio, wall thickness and the support for the pipe. Water properties that affect wave speed include bulk modulus of elasticity, specific gravity and the amount of entrained gases in the liquid. HAMMER includes a wave speed calculator and a library of values for pipe and liquid properties. See also: Understanding length/wave speed adjustments and their impact on results
Description of event that triggers the transient
While wave speed is similar for most transient model runs, the event that triggers the transient can vary widely. Causes of some types of transient events are described in the following sections.
Pump trips. Sudden shutdown of a pump, usually due to a power outage, is the most common troublesome event in water distribution systems. There will initially be a pressure downsurge on the discharge side of the pump and a pressure upsurge on the upstream side. The momentum of the fluid changes rapidly and the ensuing pressure wave can be dramatic. The rate at which the momentum changes depends on the pump inertia which is dependent on the pump properties which are primarily dependent on the specific speed of the pump and its rotational speed at the time of the pump trip. Another consideration is whether the pump is allowed to backspin during the transient.
Pump startup and shutdown. Normal startup and shutdown can also create transients, although for most large pumps, controls are in place to reduce the impact of the event. These can consist of pump control valves, soft starts or variable speed drives. When control devices are involved, the time for the valve to close or the time for the motor to ramp up or down are more important than the pump inertia. For gradual changes in motor output, the modeler can ramp up torque or speed. If there are no control devices, then pump inertia controls the transient as with pump trips. If a vapor pocket has formed after a pump shutdown, modeling a subsequent startup of the pump may be necessary in order to see the potentially damaging impact of the collapse of such vapor pockets.
Rapid valve closure/opening. Any time that a valve changes position or a hydrant is opened or closed, a transient pressure wave is created. The key input here is the time over which the valve changes position accompanied by a valve characteristic curve which describes how the hydraulic properties of the valve changes with position. The relationship between flow through the valve and valve position is not linear as the first few turns to open the valve or the last few in closing the valve usually have the greatest effect on flow.
Filling pipeline. As a pipe is filled, air is expelled through an air release valve or open orifice. Resistance from the opening to the atmosphere can cause a damaging transient when the air is fully expelled. The model initial conditions need to describe the initial air pocket (void space) size.
Directly specifying flow or pressure as boundary conditions. Users can also directly specify some known pattern of flow or head as boundary conditions to create transient events. This can correspond to some large water user starting or stopping flow. These can be specified as a single pattern or as a repeating pattern.
Description of transient control measures
Transients are eventually dampened out by friction, storage tanks and open orifices in the system. Most of the information needed by HAMMER to determine damping and other phenomena, such as reflection, which depend on system geometry are available in the WaterGEMS or WaterCAD hydraulic model. However, there are several types of devices that can prevent, control and hasten the decay of transient pressure waves and/or prevent them from causing water to vaporize (column separation). It is usually better to place the control devices on a Tee from the main pipeline in the model so that they can easily be turned on and off from on scenario to another.
See more: Transient Protection Strategies
Open surge tanks. Surge tanks with a free surface tend to dampen pressure waves by enabling water to flow from the piping into the tank during a positive wave and from the tank into the piping during a negative wave. This control primarily depends on the hydraulic grade in the tank and the size of the piping leading to the tank. With a “differential” surge tank there may be an internal riser pipe which enables the tank to increase its water level more quickly on inflow than on outflow. If the surge tank cannot be built tall enough to “float” on the system hydraulic grade, a check valve may be installed to prevent inflow in what is called a one-way surge tank. In addition to specifying the type of surge tank, the user must also describe the diameter of the tank orifice and head loss coefficient, the weir length and coefficient for the overflow, and whether it has a check valve.
Pressurized surge tanks. Pressurized surge tanks, which are often called hydropneumatic tanks or gas vessels, have a gas pocket above the water surface in the tank. Pressurized surge tanks have a great deal of flexibility and thus requires significantly more data. There are several types of surge tanks including sealed, vented and dipping tube, with and without bladders. Vented tanks have inlet and outlet orifices with different diameters. To model a hydropneumatic tank, the user must provide the volume, whether the tank is sealed or vented, the diameter of the pipe connecting the tank and the water main and whether it has a flexible bladder.

In the above figure, the red line shows the transient wave without any control while blue line shows the dampening of the wave with a pressure surge tank.
Air valves. Air valves cover a range of valves used to bleed air out of the pipes and/or introduce air into the pipes to prevent negative pressures. These can include vacuum breaker valves, slow closing, double acting, triple acting and various combination valves. The time to close and the orifice sizes are the most important input controlling the behavior of the valve. Orifices controlling air inflow and outflow rates need to be properly sized or they can exacerbate transients. The user must specify the type of air valve (slow closing, double acting, triple acting and vacuum breaker), the dimeter of the inflow and outflow orifices, whether the inflow/outflow is calculated based on an orifice diameter or an air-flow curve,
Pump controls. The usual way to describe how pump controls influence transients is to specify the time it takes to transition from full flow to zero or zero to full speed. When variable speed drives or soft starts are used, the user can also specify whether the pump speed or torque is being varied. If a flywheel is being used to slow down the acceleration and deceleration, the user can modify the pump inertia to account for its impact. The user must specify the type of startup/shutdown, the pump’s inertia and speed, and whether it has a control valve or simple check valve.
Surge relief valves/rupture disks. Surge relief valves discharge high pressure water to reduce potentially damaging pressure. The key inputs here are the pressure setting/spring constant at which the valve opens and the orifice size. Rupture disks can also relieve high pressure by opening. The pressure at which the disk ruptures and the discharge coefficient or head/flow at which it operates describes its hydraulics. For surge relief valves and rupture disks, the user must specify the threshold pressure at which it opens and for the valve, the diameter and spring constant.
Surge anticipator valve. A surge anticipator valve can open quickly on a pump trip and allow a reflected high-pressure transient to vent without causing damage. This is usually modeled by specifying the type of valve mechanism (needle, butterfly, globe), the size of the orifice and discharge coefficient when fully open.
HAMMER Calculation Options
The next considerations are the calculation options for the transient analysis. While extended period hydraulic model simulations might run one-hour time steps for 24 hours, transient events are much more short-lived. Depending on the size of the system, the major effects of transient runs are usually complete within a minute and the nature of the equations that must be solved requires time steps that are on the order of fractions of a second. Too long of a time step results in inaccuracy while too short of a time step results in long model run times. The duration of a transient run should be on the order of several times the time it takes for the transient to travel from its source to the far end of the system and back, known as the “Characteristic Time”.
Because it takes small time steps, a HAMMER model can produce a great deal of output, much of which is not needed. The user has the option to not save all the results but only save results at specific time steps or at a period longer than a single time step. The user also does not usually need to see results at every point in the system. By choosing selected points, the user can focus on the locations that are most important. HAMMER can also generate animations of transient waves moving through the system. The user has control concerning whether these results are saved. See: Recommended HAMMER Calculation Option Reporting Settings
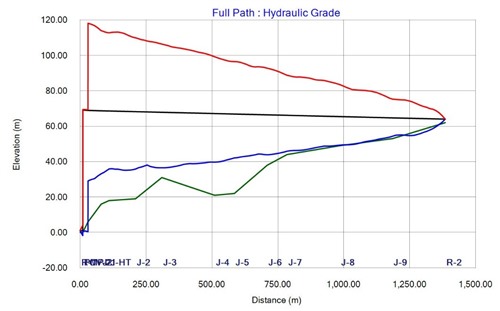
The above image is a profile showing the hydraulic grade line (HGL) which can be animated to show the fluctuations in pressure. The black line is the HGL before a sudden pump trip. The red line is the maximum HGL, the green line is the ground elevation while the blue line is the minimum HGL
The waterhammer wave is dampened out over time by control devices and friction. HAMMER enables the user to use one of four friction methods including steady, quasi-steady, unsteady and unsteady-vitkovsky. The unsteady friction methods tend to be the most accurate.
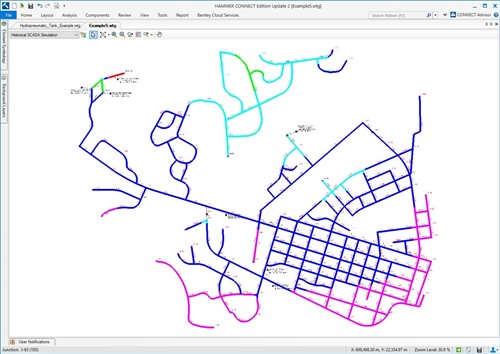
The HAMMER model of the above pipeline can be color coded based on maximum pressure over the course of a transient event with red being the highest and green the lowest.
Related topics
This paper described the kinds of data required to run a transient model like HAMMER. Some other considerations are listed in the following section.
Skeletonization. In general, transient models of full distribution systems can take much longer to run than hydraulic models and skeletonization of the network usually can reduce run times without significantly affecting accuracy However, it is important not to exclude locations that contain transient control devices or high points that are subject to column separation. The most important pipes with regard to transients are large pipes with high velocities. The acceptability of skeletonization can be assessed by running a transient model with all pipes included. The model can be skeletonized using HAMMER’s automated skeletonization tool (Skelebrator) and rerun. If there are significant changes in the results, the user can investigate to find the causes and analyze if the changes were worth the savings in runtime.
Calibration. As with any model, calibration can greatly improve the confidence users have in the results and provide reasonable expectations for accuracy. The user must ensure that the initial conditions for the transient run are calibrated to match actual conditions. While SCADA data is useful for calibrating extended period simulations, the polling time in most SCADA systems cannot capture most or all of the impacts of a transient event. Transient monitors with recorders that have very fast sampling times are needed to do an adequate job providing calibration data.
Training. The real work does not lie in building the model but understanding transients. It is highly recommended to take a class in transient analysis or read at least one of the publications on transients to understand the theory and application of transient modeling. Bentley provides the training and technical support for users to get up to speed using HAMMER. The results of transient analysis may be non-intuitive, and it is important to understand the basic principles behind transient waves and not treat the models as a black box.
Summary
Most of the labor involved in constructing a transient model should have been performed developing and calibrating the hydraulic model of the system. However, transient models require a small but very crucial amount of information regarding the cause of transients and their control.
See Also
HAMMER TechNotes and FAQs
HAMMER Playlist (YouTube)
Preparing an existing model for a transient analysis in HAMMER
Water Model Calibration Tips