Detectors
Here is a list of detectors already trained. They can be executed in ContextCapture, Orbit Feature Extraction Pro, Orbit 3DM Manage and Extract and Reality Data Analysis Service to run Annotation jobs.
Each detector was trained:
- For a specific purpose
- On a specific dataset
Meaning, while running on your dataset, each detector type can only be used for the same specific type of job.
The quality of the detection will depend on the similarity between your dataset and the training dataset’s description.
If using ContextCapture, we recommend you to update your version to the latest one.
In case no detector fits your purpose, you are welcome to submit a help ticket from your personal portal describing your expectations.
|
Name |
Detector Type |
Description |
Illustration |
Links |
|
Cracks |
Photo Segmentation |
Detect cracks in concrete infrastructure to enable defect inspection workflows. | 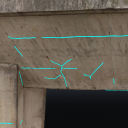 | |
|
Face & License plates |
Photo Object Detection |
Detect faces and license plates to enable anonymization workflows. |  | |
|
Traffic signs |
Photo Object Detection |
Detect traffic signs to enable asset inventory workflows |  | |
|
Cracks Ortho |
Orthophoto Segmentation |
Detect cracks in concrete infrastructure to enable defect inspection workflows. |  | |
|
Manholes |
Photo Object Detection |
Detect manholes to support mapping & surveying workflows |  | |
|
Terrain |
Pointcloud Segmentation |
Extract ground from your reality-mesh | 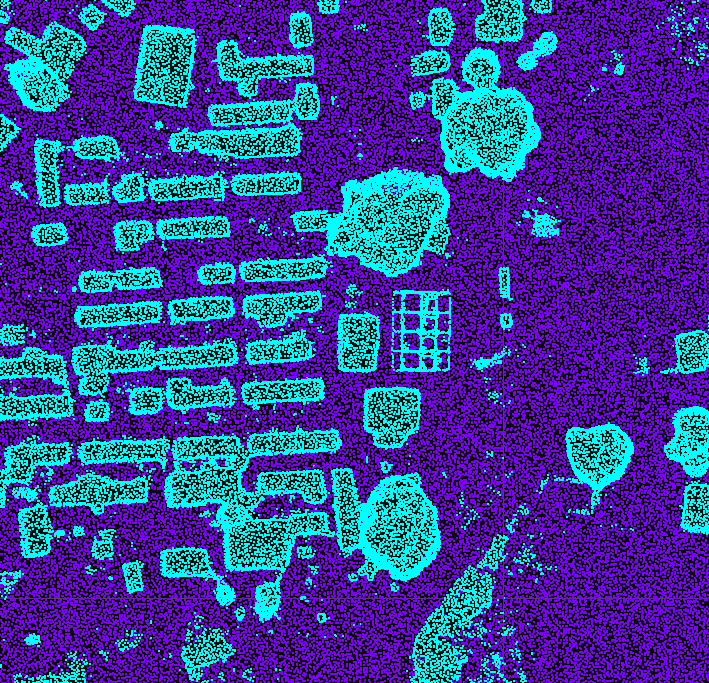 | |
|
RoofsA |
Orthophoto Segmentation |
Dataset used: vertical/aerial mapping camera |  | |
|
RoofsB |
Orthophoto Segmentation |
Dataset used: vertical/aerial mapping camera |  |
Datasets
Here is a list of sample datasets. They can be used to test the detectors above and the use of services like RDAS.
To use one of the examples, you must replace the absolute path inside the "References" tag of the example's ContextScene.xml file with the absolute path leading to where the images were saved.
|
Name |
Illustration |
Link |
|
Orthophoto Segmentation / Roofs |  | |
|
Photo Object / Face and License Plates / Traffic signs |  | |
|
Photo Segmentation / Cracks |  | |
|
Photo Segmentation / Cracks3d |  | |
|
Pointcloud Segmentation / Trees | 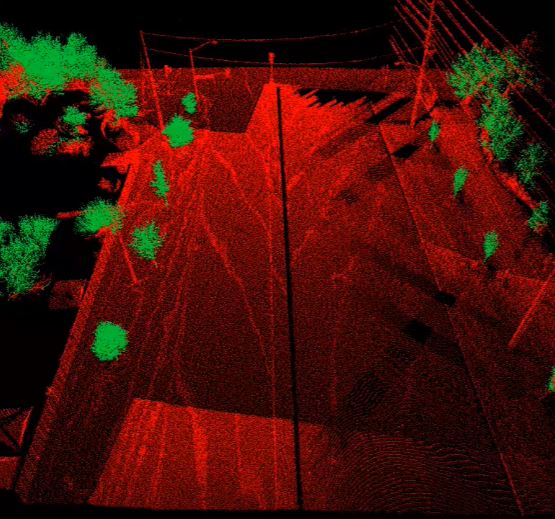 |
Detectors For Testing
Below is an extension of primary detectors’ list.
These detectors are meant to support testing of all job types.
Their training pattern is very specific and a high accuracy on personal data cannot be expected.
|
Name |
Detector Type |
Description |
Illustration |
Links |
|
Coco |
Photo Object Detection |
Detect 90 classes for everyday life objects: cars, books, chairs, etc… |  | |
|
Pascal |
Photo Segmentation |
Detect 20 classes for everyday life elements: cars, motorbikes, persons, etc… |  | |
|
CityA |
Pointcloud Segmentation |
Detect 7 classes in city environment: Roofs, vegetation, poles, power lines, ground, cars, fences | 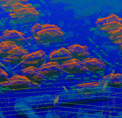 | |
|
CityB |
Pointcloud Segmentation |
Detect 5 classes in city environment: Roofs, vegetation, bridges, power lines, ground |  | |
|
Ghost |
Pointcloud Segmentation |
Detect moving elements of pointcloud capture to clan-up mapping data |  | |
|
Light poles |
Pointcloud Segmentation |
Detect lightpoles to support mapping and asset-inventory workflows |  | |
|
Rail |
Pointcloud Segmentation |
Detect 13 classes for usual rail assets: signals, sensors, rails, etc… |  | |
|
Trees |
Pointcloud Segmentation |
Detect trees for mapping or clash prediction workflows |  |